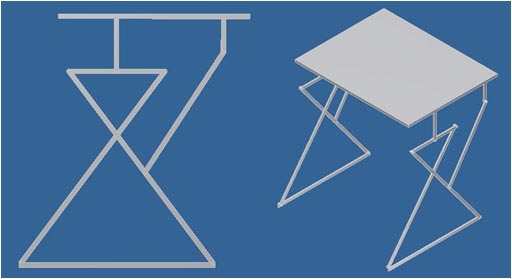
Linear Motion Table

The objective of this project is to design and simulate a horizontal-platform mechanism using CAD and Matlab and then analyzed the mechanism position, velocity, and motor’s torque. The platform must fulfill certain criteria during its horizontal motion to satisfy and pass the prerequisite. This mechanism, once finished, has a quick return and a well-defined horizontal motion. This makes this mechanism a good mechanism for performing slow linear motion and quick return to repeat the action. During the final steps we realized the Chebyshev is the easiest application to make this mechanism into a linear motion mechanism.
Linear Motion Table
* Use Show/Hide if on desktop for best view. Works for most smart phone but low quality with some formatting errors.
(Better suggestion? Email me: wilsonqanda@gmail.com)